Junnan Jiang (蒋俊南)
I am now a master student in Institute of Technology Sciences, Wuhan University. Advised by Prof. Miao Li. My research areas include robotic perception, grasping and manipulation. I obtained my bachelor's degree from School of Automation Engineering, University of Electronic Science and Technology of China (UESTC) in 2021.Email: elevenjiang8 [at] gmail [dot] com
Github: https://github.com/elevenjiang1
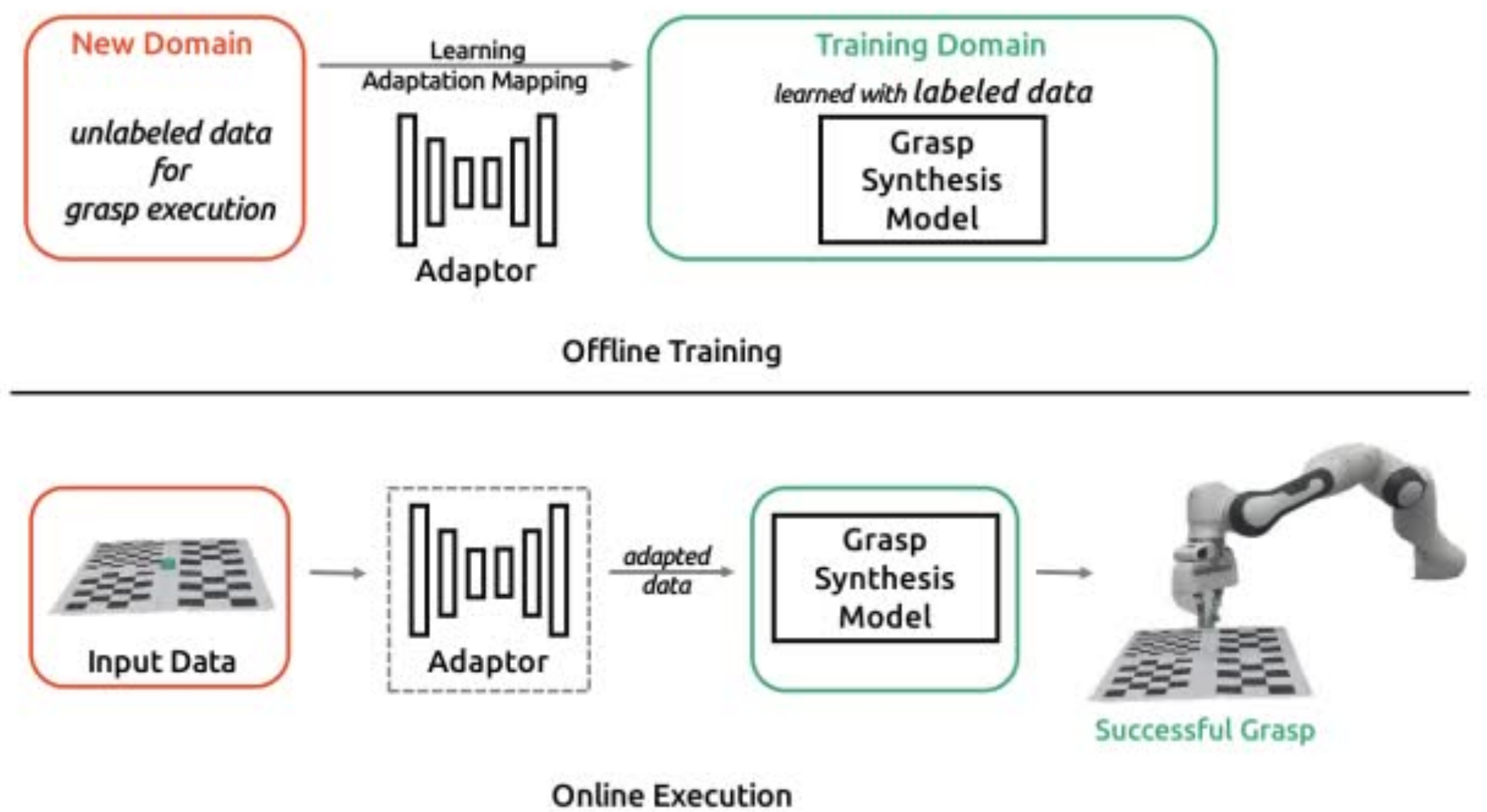
Research Interests: Robotic Grasping, Computer Vision, Robotic Manipulation